쉬운 DriverExamples
샘플 코드와 프로젝트는 stepperruning을 얻을!
설명:
Lotsof 사람들은 buyEasyDriversorBigEasyDriversandthen 그들의 프로젝트에서 다만 벌금을 일하기 위하여 그들을 얻습니다. 그러나 일부는 그렇지 않습니다. 그래서 나는 가능한 한 빨리 일하면서 쉬운 드라이버를 얻기위한 몇 가지 간단한 지침을 작성하는 것이 좋은 생각이라고 생각했습니다.
Allof이 예는 나의 쉬운 운전사와 BigEasy 운전사 댄서 모터 운전사 널으로 내가 실험실 주위에 속이는 몇몇 differentrandom 댄서 모터를 몰고 있을 것입니다. 이 모든 예제가 모든 Arduino orArduino 클론 또는 Arduino 호환 (모든 chipKITboards 같은) 와 함께 작동해야하지만, 나는 단계와 방향 펄스를 begeneration.
Anddon 읽는 것을 잊지 마세요. Dan Thompson`sexcellentEasyDriver 튜토리얼 블로그 postifyou이 물건에 더 읽기를 원합니다. 그 블로그 포스트에 대한 의견에 큰 질문을했습니다.
주 1: 모든 예는 쉬운 운전사 또는 큰 easydrivers와 동등하게 잘 작동할 것입니다.
Note2: 모든 예는 arduino뿐만 아니라 chipKIT 널에서 일할 것입니다 (and몇은 PIC32speed 때문에 chipkit에 매우 잘 달릴 것입니다)
주 3: 모든 예는 전원 입력을위한 배럴 잭을 보여줍니다-당신은 어떻게 든 easydrivers에 전원을 공급해야하지만, 바렐 잭을 비 필요가 없습니다. 당신은 전원 공급 출력 somevoltage 사이 5V 30V, 1 Amp 또는.
예제 1: 기본적인 Arduino 체제
Thisis 가장 기본적인 예는 Arduino, EasyDriver 및 댄서 모터로 가질 수 있습니다. 연결 모터 네 전선을 theEasy 드라이버 (적절한 코일 연결로 연결하십시오 powersupply 12V 전원 핀 연결하고, Arduino`sGND, 핀 8 핀 9 쉬운.

이 스케치를로드하고 Arduino orchipkit에 실행하십시오:
무효 설정 () {
PinMode (8, 산출); pinMode(9, 산출); digitalWrite(8, 낮은); digitalWrite(9, 낮은);} 무효 반복 () { digitalWrite(9, 높은); 지연 (1); digitalWrite(9, 낮은); 지연 (1);}
그것보다 훨씬 간단하지 않습니다. 코드는 무엇입니까? 그것은 setsup 핀 8 9 as 출력. 그 다음 메인 루프에서, 단순히 토글 사이에 1 ms를 기다리는 핀 9 높고 낮은 토글. 우리는 핀 9 as 단계 제어 andpin 8 방향으로 제어 쉬운.
Sincewe는 쉬운 운전사 낮은에 MS1 또는 MS2 낮게 당기지 않으며, 쉬운 운전사는 1/8th microstep 형태에 과태 할 것입니다. 그 의미는 매번 "digitalWrite(9, 높은);" 통화 실행, thestepper 모터는 전체 단계의 1/8th 이동합니다. 따라서 모터 is1.8 도 단계당, 혁명 당 200 전체 단계, 또는 1600 마이크로 스텝 perrevolution.
Sohow 빠른이 코드가 스테퍼 실행됩니다? 음, STEPsignal 1ms 높은 1ms 낮은, 각 전체 펄스 2ms oftime 걸릴 것입니다. 1 초에 1000 ms가 있기 때문에 1000/2 = 500 마이크로 스텝/초.
모터가 더 느려지고 싶었을까요? 우리는 지연을 변경합니다 (); Linesto에는 더 긴 지연이 있습니다. 당신이 지연 (10) 를 사용하는 경우에; 둘 다를 위해, 50 마이크로 스텝/초에 you`llmove.
모터가 더 빨리 가고 싶었을까요? 우리는 실제로 지연 forless 1 ms 우리는? 예, 물론 우리는 할 수 있습니다! 우리는 delayMicroseconds(100) 에 thedelay() 통화를 바꿀 수 있습니다; 각 delaywill 100 microseconds (또는 우리), 그래서 모터는 at5000 microsteps/second를 몰 것입니다.
지금, 당신이 함께 재생해야하는 한 가지-현재 조정 냄비당신의 쉬운 드라이버. 당신은 그것을 돌리기 위하여 작은 나사 운전사를 필요로 하고, 그것을 너무 멀리 어느 방법 또는 다른 사람 (they`redelicate) 를 강요하지 않기 위하여 확실하십시오. 또한 일부 쉬운 드라이버는 haveno 물리적 정지가 그들에게 중지되는 냄비로 만들어졌으므로 주변과 주변에 돌립니다. 위 부호로, 천천히 남비 편도 또는 다른 사람을 돌립니다. 모터 유형에 따라 당신은 (그리고 그 코일 저항) 당신이 냄비를 스핀, 또는 당신은 꽤 큰 차이를 maynotice/어떤 차이도 느낄 수 있습니다.
예 2: 앞뒤로 이동
Ifwe 예를 들어 1, 단순히 스케치를 조금 변경하십시오, 우리는 앞으로 또는 뒤로 단계의 특정 수를 이동할 수 있습니다. Likeso:
Int 거리 = 0; /우리가 가지고 간 단계의 수를 기록하십시오
Void 체제 () { pinMode(8, 산출); pinMode(9, 산출); digitalWrite(8, 낮은); digitalWrite(9, 낮은);} 무효 반복 () { digitalWrite(9, 높은); delayMicroseconds(100); digitalWrite(9, 낮은); delayMicroseconds(100); 거리 = 거리 + 1; /이 단계를 기록//우리가 우리의 움직임의 끝에 있는지 확인하려면 확인 (거리 = = 3600) { /우리는! 반전 방향 (반전 DIR 신호) 만약에 (digitalRead(8) = 낮은) { digitalWrite(8, 높은); } 다른 {digitalWrite(8, 낮은); } /다시 0으로 다시 우리의 거리를 다시 다시 다시 다시 우리가//시작 새로운 이동 거리 = 0; //이제 반 두 번째 지연 (500); }}
Nowusing이 스케치, 우리는 한 방향으로 3600 단계를 이동, 일시 중지, 그리고 다른 방향으로 3600 단계를 이동합니다. 나는 당신이 지금 이동의 많은 다른 길이를 만드는 방법을 알아낼 수 있는지 확신합니다. Andyou는 각 이동의 단계 사이의 지연을 변경하여 atseparate 속도가 발생할 수 있습니다.
예 3: 사전 제작 도서관 사용-AccelStepper
위의 예제를 잘 할 수없는 것은 동일한 Arduino 또는 chipkit에서 여러 steppersfrom 처리됩니다. 또한 가속 및감속은 어렵습니다. 다른 사람들은 thisproblem로 달리고, 그래서 지금 우리는 우리가 thesproblem를 고치기 위하여 Arduino IDE 또는 mpide에 andinstall 다운로드해서 좋은 도서관이 있습니다.
AccelStepper libraryfromthispage의 zip 파일을 Downloadthe 다운로드 한 파일을 압축 해제하고 arduino의 thelibraries 폴더에 AccelStepper 설치 디렉토리를 배치하십시오. 그 forMPIDE (chipKIT) 사용자를 주의하십시오, 당신은 AccelStepper folderin을 상위 수준에서 라이브러리 폴더뿐만 아니라 \ 하드웨어 \ pic32 \ 라이브러리를 복사해야하므로 avr과 PIC32 측면을 모두 사용할 수 있습니다.
Usingthe 같은 하드웨어 예를 1, 다시 IDE 입력 thefollowing 스케치:
# 포함
/스테퍼 및 핀을 정의합니다. 스테퍼 스테퍼 (1, 9, 8);int pos = 3600; 무효 설정 (){스테퍼. setMaxSpeed(3000); 스테퍼. setAcceleration(1000);} 무효 루프 (){ if (스테퍼. distanceToGo() = 0) {지연 (500); pos = -pos; stepper.mo veTo(pos); } stepper.ru n();}
Thiscode 않습니다 기본적으로 같은 예를 들어 2, usingacceleration/감속 통해 AccelStepper 도서관, runningfor 두 많은 단계. (더피 씨를 가리키는 것에 감사간단한 사실!) 많은 단계로 두 번 실행되는 이유는 더 짧고 간단하게 물건을 유지하기 위해 "pos = -pos" 을 수행합니다. 이것은 것입니다그것은이 실행됩니다 0에서 3600, 다음 3600-3600 (7200 단계).
예 4: 여러 스테퍼 모터 실행
AccelStepper 라이브러리에 대한 훌륭한 것들은당신이 할 수 있다는 것입니다. 당신이 원하는대로 많은 스테퍼 모터를 실행하고, 동시에, 더 많은 AccelStepper 개체를 우회합니다. 지금, 당신이 그들을 실행하려고하는 경우빠른, 단계는 부드러운, 그래서 당신은 너무 많은 arduino를 toload 조심해야합니다. The chipKIT 없습니다 thisproblem 때문에 너무 빨리 theArduino.
Inthis 다이어그램, 우리는 두 쉬운 드라이버와 두 스테퍼 모터. 우린 2 더 핀을 Arduino 추가 이 secondmotor.
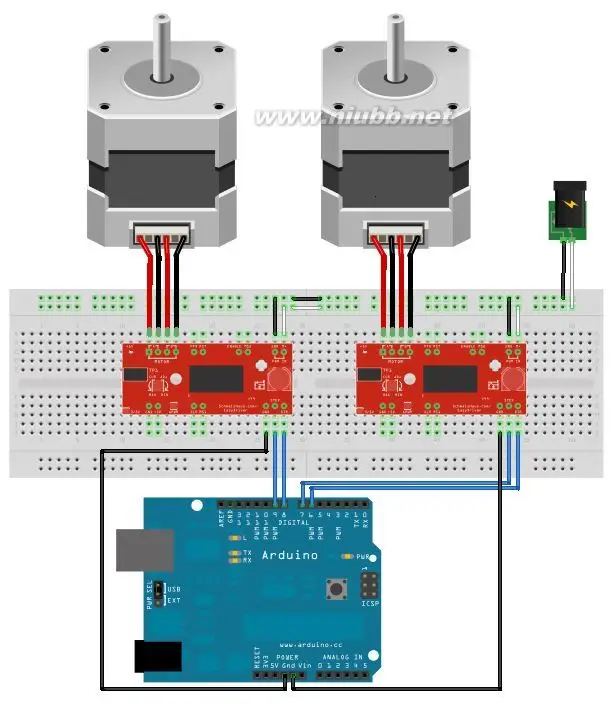
이 예의 코드는 shownbelow:
# 포함
//그들이 사용하는 두 개의 스테퍼 및 핀을 정의합니다. 스테퍼 stepper1(1, 9, 8);AccelStepper stepper2(1, 7, 6);int pos1 = 3600;int pos2 = 5678;void 체제 (){ stepper1.setMaxSpeed(3000); stepper1.setAcceleration(1000); stepper2.setMaxSpeed(2000); stepper2.setAcceleration(800);}void loop(){ if (stepper1.distanceToGo = 0) {
Pos1 =-pos1;
Stepper1.moveTo (pos1);} (stepper2.distanceToGo() = 0) { pos2 = -pos2; stepper2.moveTo(pos2); } stepper1.run(); stepper2.run()
Ifyou이 코드를 실행하면 가속 및감속 (anarduino에서-다시, 이 문제는 chipkit에서 발생하지 않습니다) 단일 모터와 마찬가지로 매우 원활하지 않습니다 찾을 수 있습니다-즉 isbecause 우리의 두 가지 최대 속도 (3000 및 1000) 는 매우 높습니다. 프로세서의 능력은 처리합니다. 하나의 솔루션은 최대 속도를 낮추고 1/8th microstepping to1/4, half 또는 full step 모드에서 전환합니다. 오른쪽이 끝나면 sameshaft 회전 속도를 볼 수 있지만 CPU 하중이 적습니다 (초당 많은 단계로 변하기 때문에).
Youcan 볼 이 예를 그냥 복사 및 codefrom 예 3 및 두 위치 두 스테퍼. Thisexample 코드는 매우 간단하고 유용하지 않지만 AccelStepper 라이브러리에서 기존 예를 연구하고 다른 기능에 도움말 페이지를 읽습니다. 그리고 좋은 아이디어를 얻으십시오. 스테퍼 제어로 할 수있는 다른 것.
참조:
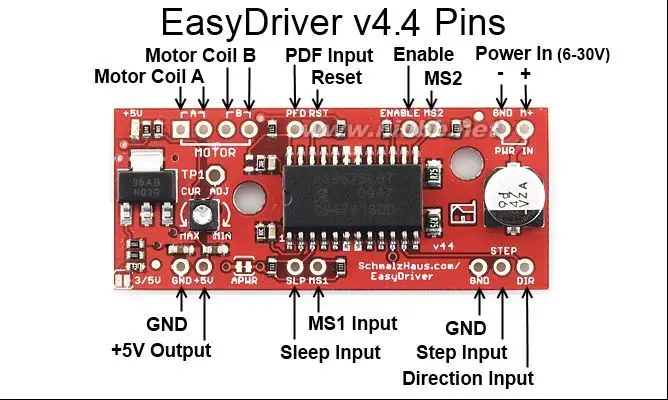
쉬운 DriverPinout:



























 배송기간
배송기간