|
|
  aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 브랜드 이름: WeiKedz
- 근원: CN (정품)
- 사용법: Rotary Encoder Module
- 재료: 중합체
- 유형: 진동 센서
- 출력: 아날로그 센서
- 이론: Rotary Encoder Module
- 모델 번호: Rotary Encoder Module
- 맞춤 가능 유무: 그렇습니다
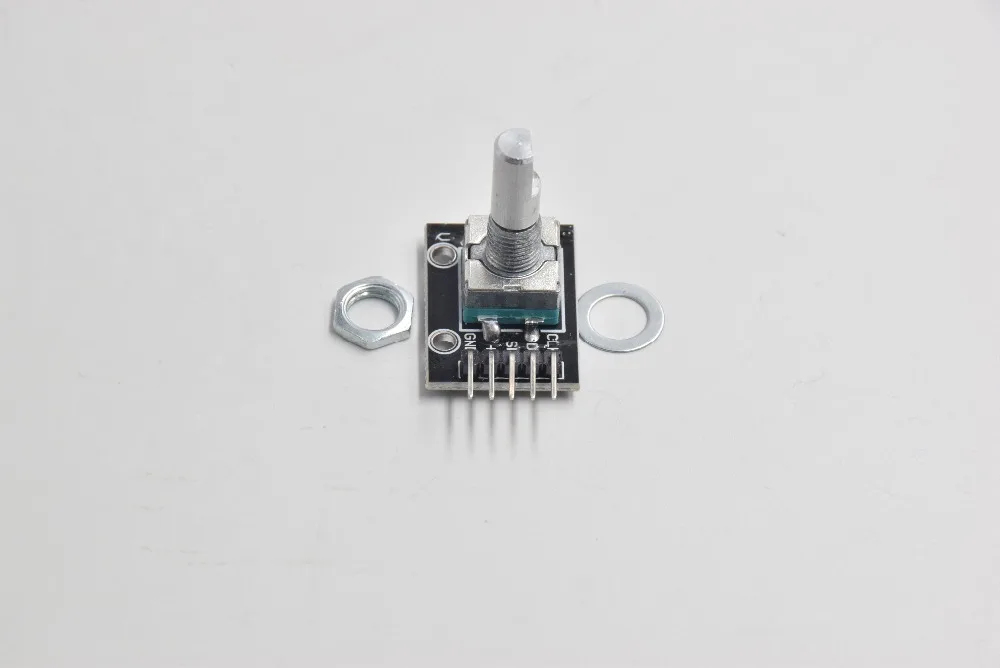
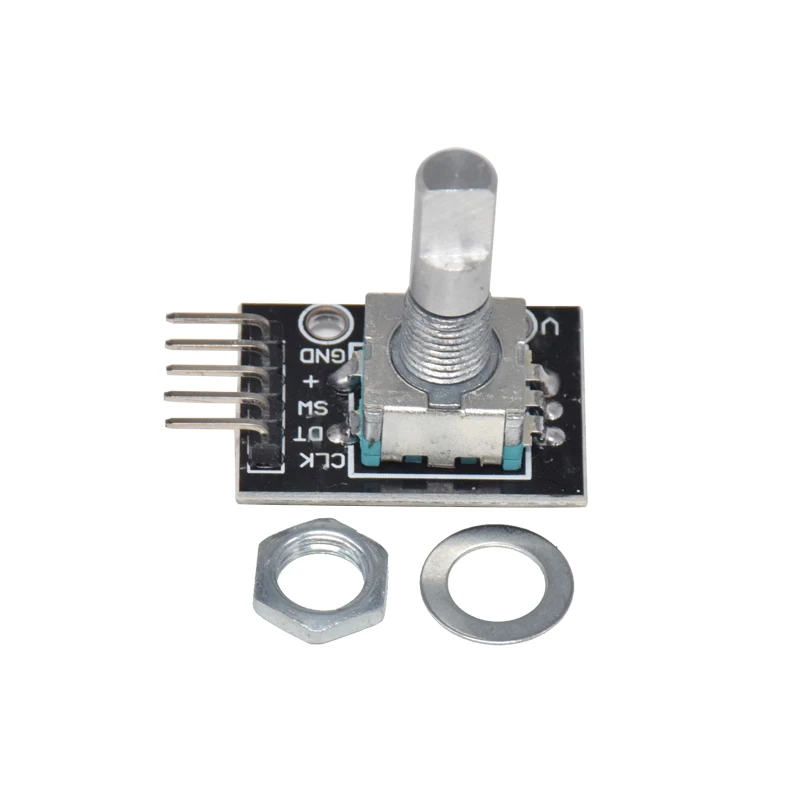
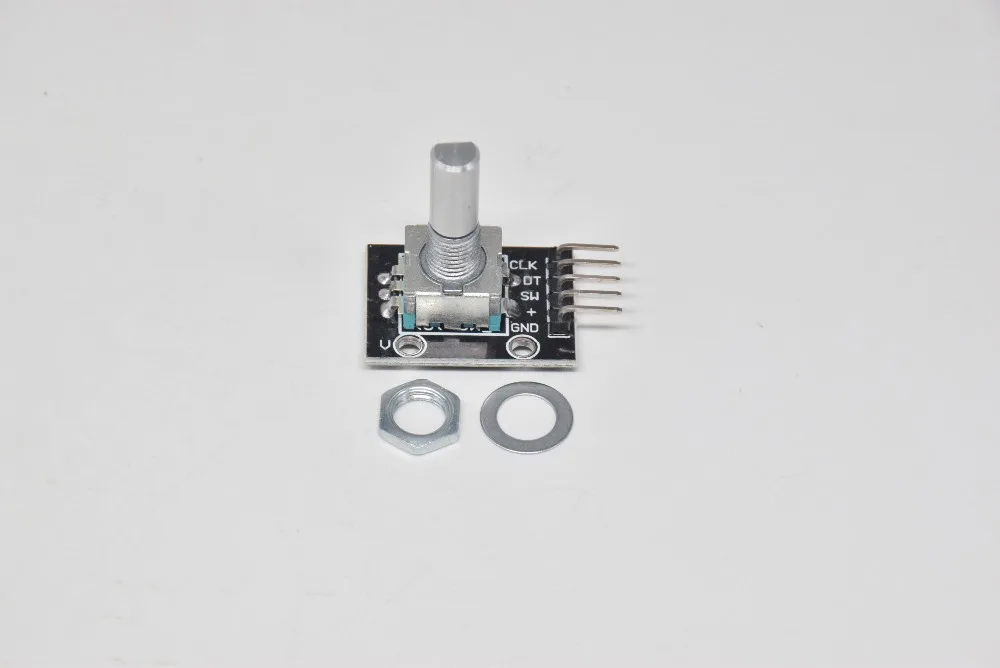
공장 도매 10 개/몫 로터리 엔코더 모듈 벽돌 센서 개발 Dropshipping KY-040
회전하는 인코더는 산출 맥박 빈도의 교체 도중 앞으로 그리고 반전 방향을 자전해서 세어질 수 있습니다,
카운터 회전 potentiometer 차계와는 달리, 이 회전 카운트는 제한되지 않습니다.
버튼이있는 회전하는 인코더는 리셋 초기 상태에 시작하는 계산 0.
Led가 ******************
ARDUI-NO 테스트 코드:
Const int interruptA = 0; /Interrupt 0 (핀 2)
Const int interruptB = 1; / / Interrupt 1 (핀 3)
Int CLK = 2; /PIN2
Int DAT = 3; / / PIN3
Int 단추 = 4; / / PIN4
Int LED1 = 5; /PIN5
Int LED2 = 6; / / PIN6
Int 조사 = 0;
Void 설정 ()
{
AttachInterrupt (interruptA, rotestateanged, 떨어지는);
/AttachInterrupt (interruptB, buttonState, 떨어지는);
PinMode (CLK, 입력);
DigitalWrite (2, 높은); /잡아 당기기 높은 Restance
PinMode (DAT, 입력);
DigitalWrite (3, 높은); /잡아 당기기 높은 Restance
PinMode (단추, 입력);
DigitalWrite (4, 높은); /잡아 당기기 높은 Restance
PinMode (LED1, 출력);
PinMode (LED2, 출력);
Serial.begin (9600);
}
Void 루프 ()
{
If (! (digitalRead (버튼)))
{
COUNT = 0;
Serial.println ("STOP COUNT = 0");
DigitalWrite (LED1, 낮은);
DigitalWrite (LED2, 낮은);
지연 (2000);
}
Serial.println (조사);
}
/ / -------------------------------------------
Void rotestateanged () /CLK 떨어지는 경우 DAT 읽기
{
만약에 (digitalRead (DAT)) /DAT = 최고가 앞으로 때
{
카운트;
DigitalWrite (LED1, 높은);
DigitalWrite (LED2, 낮은);
지연 (20);
}
DAT = LOW 가 backrote일 때 다른//
{
카운트;
DigitalWrite (LED2, 높은);
DigitalWrite (LED1, 낮은);
지연 (20);
}
}
|
|
|
|
|
















 배송기간
배송기간